X-Drive
Un X-Drive est un type de base utilisant des omni-wheels ou roues omni-directionnelles placées dans une configuration dans une forme de X, avec les roues aux
extrémités. Le X-Drive utilise au moins
un moteur par roue afin de commander chaque roue séparément ce qui lui donne la
particularité de pouvoir se déplacer dans toutes les directions sans avoir besoin
de pivoter. Ceci provoque par ailleurs une augmentation de la vitesse par
rapport à une base normale (nous verrons pourquoi plus tard). Le but de ce
tutoriel est d’expliquer le fonctionnement théorique d’un X-Drive afin de
pouvoir comprendre les principes qui en font un type de base très particulier.
Le Principe
Le principal avantage d’un X-Drive est sa capacité à se
déplacer dans toutes les directions sans avoir à pivoter : on dit qu’il
s’agit d’une base holonomique. Ceci
est dû au fait que les roues soient orientées à 45° par rapport à une base
régulière de telle sorte qu’elles forment un X si on représentait leurs axes de rotation.
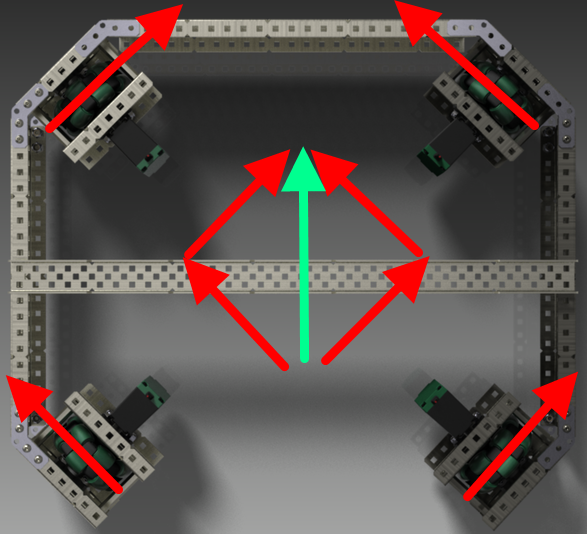
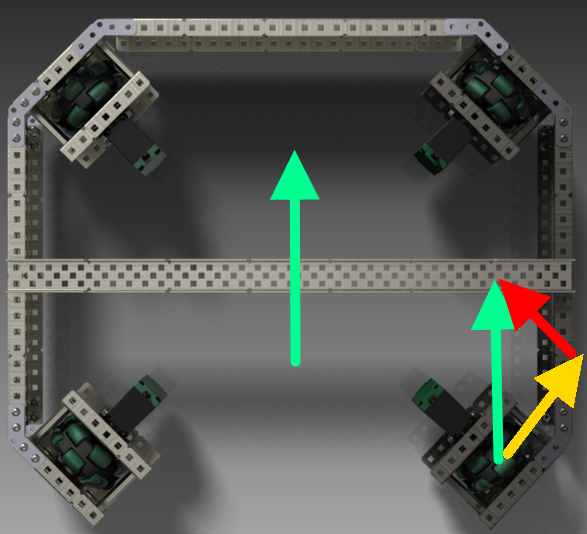
Sur le schéma suivant on fait tourner les roues de sorte qu’elles
avancent dans le sens des flèches rouges. On peut voir que si on les fait
tourner dans cette configuration, la somme vectorielle des vecteurs Vitesse (la
flèche verte) est dirigé vers l’avant du robot : ainsi le robot avance.
Même si vous ne connaissez pas la notion de vecteur vous pouvez comprendre ce
phénomène intuitivement : chaque roue va en diagonale vers l’avant avec
deux des roues vers la gauche et deux des roues vers la droite : les
composantes droite et gauche de ces mouvements vont se compenser et le robot va
avancer.
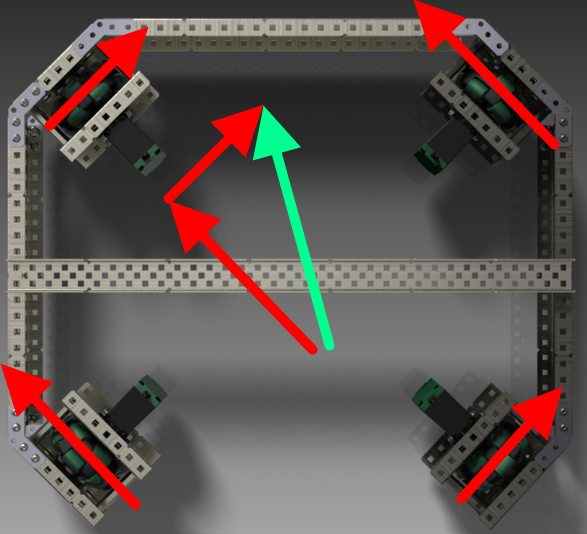
On peut également constater que les roues étant symétriques l’on
peut effectuer ce mouvement dans les quatre directions (avant, arrière, gauche
et droite) et ainsi avoir cette possibilité d’holonomie. De plus on peut se
déplacer dans n’importe quelle direction en faisant varier la vitesse de deux
roues diamétralement opposés (les deux roues qui sont reliés à la même branche
du X) comme l’illustre le schéma suivant où deux des roues sont ralenties ce
qui fait que le robot se déplace en biais.
Les Omni-Wheels
Une composante majeure d’un x-drive est l’utilisation d’omni-wheels,
ou roues omni directionnelles. En effet, si le robot avance tout droit chaque
roue doit compenser ce mouvement par deux mouvements en diagonale, comme l’illustre
ce schéma :
Ainsi, la roue va pouvoir effectuer la partie jaune du
mouvement simplement en tournant mais le second mouvement (en rouge) ne peut s’effectuer
que par le frottement de la roue sur le sol. Bien évidemment ceci causerait des
pertes en énergie phénoménales, d’où l’importance capitale des omni-wheels.
En effet, ces roues un peu spéciales disposent de dizaines de petites roulettes sur leur tranche ce qui leur permet de glisser sur le côté avec un minimum de frottements tout en tournant comme une roue normale. Ainsi, ce sont les petites roulettes de l’omni-wheel qui pourront effectuer le mouvement rouge et ainsi ne pas perdre d’énergie en raison des frottements.
En effet, ces roues un peu spéciales disposent de dizaines de petites roulettes sur leur tranche ce qui leur permet de glisser sur le côté avec un minimum de frottements tout en tournant comme une roue normale. Ainsi, ce sont les petites roulettes de l’omni-wheel qui pourront effectuer le mouvement rouge et ainsi ne pas perdre d’énergie en raison des frottements.
Les effets sur la vitesse et la force
Même si ce n’est pas intuitif pour beaucoup de gens, une
configuration X-Drive va plus vite qu’un même robot avec une configuration
normale.
Afin de mieux comprendre ce phénomène il est utile de regarder ce qu’il se passe quand le robot se déplace en diagonale :
Afin de mieux comprendre ce phénomène il est utile de regarder ce qu’il se passe quand le robot se déplace en diagonale :
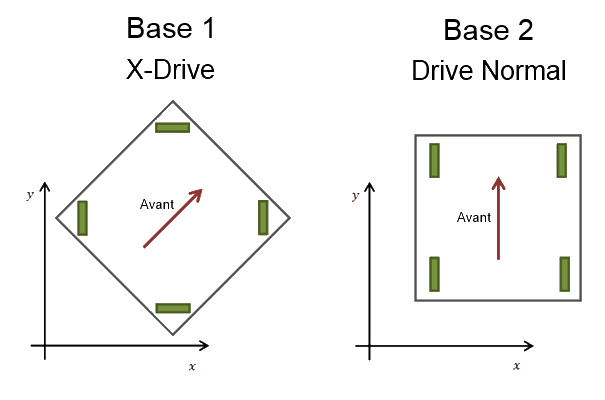
Ces deux bases sont identiques mais l’une est en
configuration X-Drive tandis que l’autre est en configuration dite normale.
La base 1 peut se déplacer dans la direction y en ne faisant tourner que ses roues gauche et droite. Les roulettes des roues avant et arrière glisseront librement. Dans ce cas, elle avancera aussi vite que la base 2 mais avec deux fois moins de force car elle n’utilisera que deux moteurs au lieu de quatre. De manière analogue, elle peut se déplacer à la même vitesse que la base 2 dans la direction x.
Quand la base 1 va vers l’avant, c’est-à-dire qu’elle avance à la fois en x et en y, elle avance à la vitesse de la base 2 dans la direction x mais avance aussi dans la direction y à la vitesse de la base 2 donc sa vitesse totale sera plus grande que celle de la base 2. C’est également pour cette raison que dans certains jeux vidéo il est possible d’avancer plus rapidement en se déplaçant en diagonale.
La base 1 peut se déplacer dans la direction y en ne faisant tourner que ses roues gauche et droite. Les roulettes des roues avant et arrière glisseront librement. Dans ce cas, elle avancera aussi vite que la base 2 mais avec deux fois moins de force car elle n’utilisera que deux moteurs au lieu de quatre. De manière analogue, elle peut se déplacer à la même vitesse que la base 2 dans la direction x.
Quand la base 1 va vers l’avant, c’est-à-dire qu’elle avance à la fois en x et en y, elle avance à la vitesse de la base 2 dans la direction x mais avance aussi dans la direction y à la vitesse de la base 2 donc sa vitesse totale sera plus grande que celle de la base 2. C’est également pour cette raison que dans certains jeux vidéo il est possible d’avancer plus rapidement en se déplaçant en diagonale.
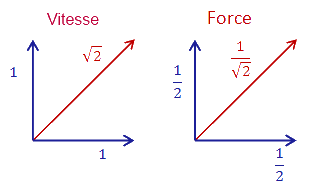
Pour connaître le facteur d’augmentation de la vitesse par
rapport à une base normale il suffit d’appliquer le théorème de Pythagore pour
trouver l’hypoténuse d’un triangle dont les deux autres côtés sont égaux à 1.
Le résultat est racine de 2, soit environ 1,4. Un X-Drive est donc 1,4 fois
plus rapide qu’une base normale. De même, la force est réduite par un facteur
de 1,4, on a donc plus de vitesse mais moins de force.
Illustration
Cette vidéo d’une base qui peut alterner
entre configuration tank et x-drive réalisée par l’équipe AURA (Nouvelle
Zélande) illustre bien le fait qu’un x-drive est plus rapide :
Questions/Remarques
Si vous souhaitez nous contacter vous pouvez le faire via notre page contact :
Crédits
Merci à l'équipe 323z pour nous avoir fourni les images de X-Drive réalisées en CAO et merci à l'équipe AURA pour les graphiques et explications des effets d'un x-drive sur la vitesse.
